
Home › Forums › Environmental Sensors › DF Robot KIT0139 Level Sensor
- This topic has 2 replies, 2 voices, and was last updated 2022-10-13 at 8:01 AM by
Dave.
-
AuthorPosts
-
-
2022-10-07 at 12:35 PM #17389
Hello
I thought I would share my experience of using the DF robot gravity industrial level sensor (KIT 0139), as there have been a few posts about it.
I’ve connected this to an Arduino MKR1400 GSM board via an ADS1115 16-bit ADC.
The results initially were stable enough. I put the sensor in a covered bucket of water (static level) and checked this regularly.
The level readings increased slightly during the day and fell again at night (when the actual water level was static).
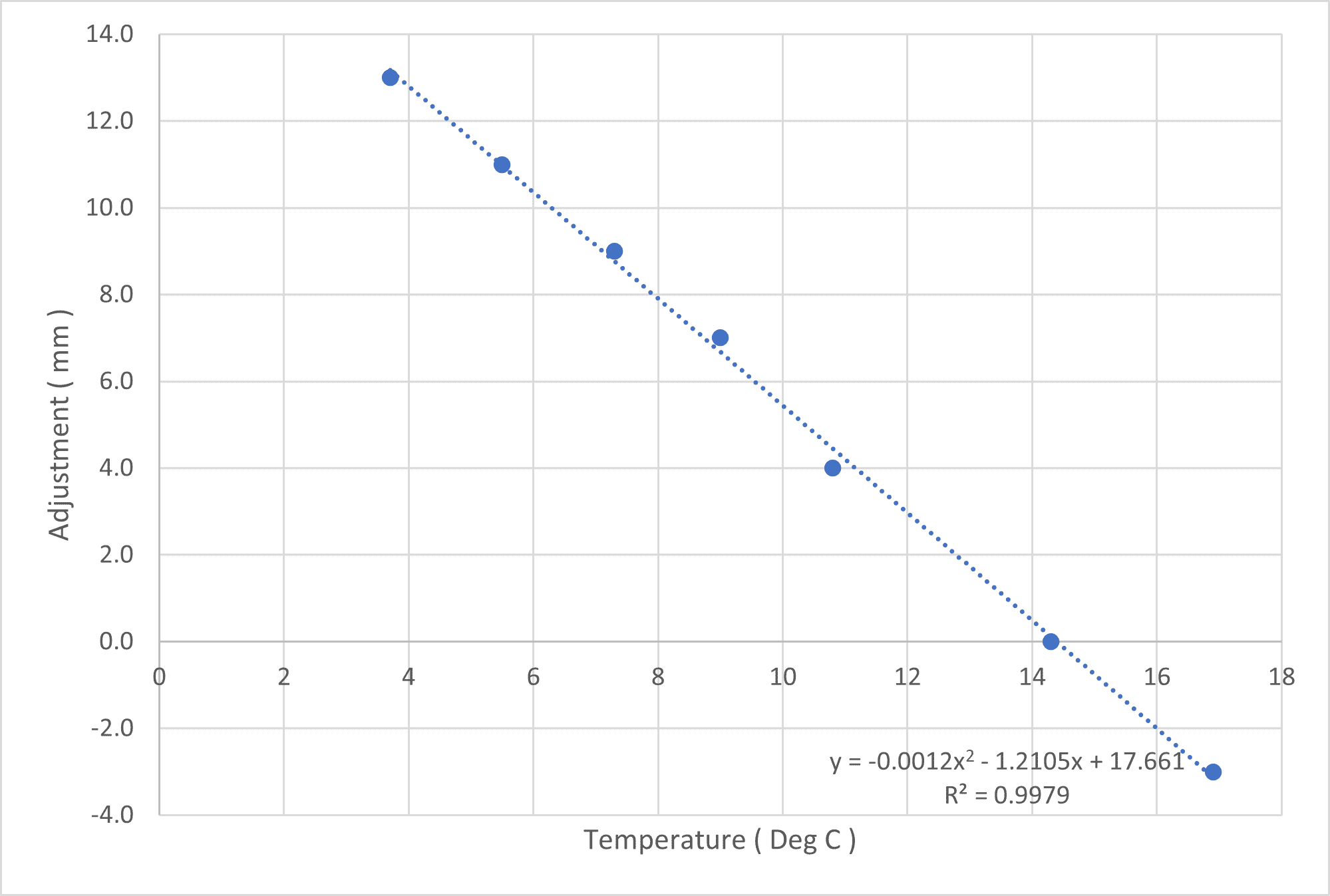
The addition of a temperature probe appears to have cured this problem – see attached image.
Adjustment factor = actual depth (mm, measure with tape) – recorded depth (mm, measured with sensor)
This is obviously related to the change in density of water with temperature, but I thought it would be useful to post here for new users of this sensor.
Over the last couple of weeks of lab testing, the sensor has been remarkably stable, particularly considering the cost ~€40
This sensor will be going into a piezometer next week, so fingers crossed!
Have a good weekend
Dave
Attachments:
-
2022-10-11 at 9:33 PM #17391
Hello Dave, thanks for sharing.
I had thought of getting the device, because of the price, so interesting.
The issues I saw is that it has two sources of analog error and unquantified temperature coeffocient for each source of error.
Every “analog” device typically has a temperature dependency, This would be the depth sensor itself, which will vary the reported depth based on the varying temperature of the water. Typically small if the temperature is stable as in underground water measurement.
The second analog error – which is the current transformed to the voltage. This resistance will vary based on the air temperature. Resistor need to be selected and stated for the their temperature variation. There are resistors that have a low temperature coefficient. So the device from Seeed should state what its temperature coefficient is, but I couldn’t find it.
So just an observation, and thanks again for sharing.
-
2022-10-13 at 8:01 AM #17392
Hi Neil
Thanks for the feedback. So I guess a separate sensor housed in the same box as the mkr1400 would be useful. That’s on the (long) list of improvements!
I’ll post some actual data from the piezometer in the next couple of weeks.
Cheers
Dave
-
-
AuthorPosts
- You must be logged in to reply to this topic.