

As part of a team in 2013 I worked on a remote river monitoring project, with partners Cemar.org and a local chapter of The Nature Conservancy. This was related, but not part of and in a different watershed, some of the big picture monitoring described in cohopartnership.org. The monitoring was going to require a number of critical locations on the river and tributary streams to be monitored – and the picture shows the initial loggers in acceptance testing.
My part of the project as an independent contractor: Recommend equipment to reliably measure low water levels of in-stream depth and make the measurements available in reasonable real-time through the internet. These are streams in California impacted by the drought and anthropogenic water usage.
Specification: Measure water levels to 0.01’(feet) in the last foot of water – the zone where the flow may sharply decrease – for a total measurable water depth range of 0-10’.
I thought it would be useful to share some of what was learnt about specific pieces of equipment, promote a discussion on enviroDIY about depth sensor, and what are the total project costs in measuring water depth in real-time. For water quality measurement at a specific site, the first metric is water-depth to a known level of accuracy. Real-time measurement, with loggers and wireless radios that transfer measurements to be accessible on the internet is a base level enabler for other types of water quality measurement. Extensible common control with open interfaces are also an enabler for other types of physical water quality measurements. I expect this blog to be part of a series and I encourage anybody with their own projects to post about their project objectives, project costs (where they can), experiences, and questions that came up in their projects.
All life – and most measurement sensors – are impacted by temperature. That is absolute temperature and temperature variations. For our project it was decided that the sensors could experience a 10C daily (diurnal) variation and the sensor error due to temperature in standing water should not change more than +/-0.01’
It turns out this is a very challenging specification for most types of water depth sensors. The most common form of sensor is a pressure sensor – though I hope in a later blog to look at a variety of sensors. For accurate changes at low water stream depth, the measurement capability of most sensors is very challenging. For best accuracy a “vented” pressure sensor was selected – that is changes in atmospheric pressure are nulled out by providing one side of the sensor with atmospheric pressure, and on the other side measuring the weight of water above the sensor.
With a requirement to monitor the water depth via the internet, the question is whether to go with an integrated package or a variety of equipment with an open interface between the equipment.
Industrial packaged rugged water depth sensors (called a transducer when referring to the whole mechanical temperature compensated unit from now on) typically have interfaces that are two wire analog 4-20mA output, or 4 wire digital RS485. Both of which typically require about 12V excitation voltages.
While the pressure transducers often support both analog 4-20mA and an open documented modbus/RS485 interface, there weren’t any low cost open design loggers that could interface to the wider variety of settings in the modbus protocol. Though who knows what the future holds – and enviroDiy has a logger Mayfly – and PublicLab has its open-water project.. 🙂
So for an open interface between transducer and logger, the choice in 2013 was to use the 4-20mA current loop.
The 4-20mA works well here for relatively long loops of wire in the riparian zone- 50-200′ is no problem. It only requires 2 wires – which for a challenging field situation where it could be a long walk to the project location, carrying all equipment and tools, is an advantage. Since it’s a current loop, it is immune from common mode EMI that a voltage interface could suffer from. The 4-20mA has the benefit, if the wires become open circuit – 0mA – that the reading will be a large negative – an error. Similarly if the wire anywhere is short-circuited, and the reading is over 20mA then that is also clearly an error.
On the downside, it is technically challenging to get an accurate 4mA to represent an absolute 0.00…., the sensor in the transducer also has this issue, so it has to be solved another way.
However with all equipment with electrical transmission over wires, they are susceptible to lightening surges – and some rivers I’ve heard can have lightening bolts travel down them – the transducers do specify some protection for lightening. The physical cable also needs protecting/ruggedizing from local critters – squirrels and rabbits to bears . For modern electronics, the downside for both the 4-20mA & modbus is they require an excitation voltage of 12V.
There are a lot of different professional loggers, and new exciting open design loggers like the mayfly, so each project needs to define the common monitoring equipment appropriate for the project environment. Please share any experiences or favorite loggers you know about. For this project an Onset U30 cellular logger with a dual analog interface of 4-20mA was chosen, based on good past experience and 12bits of resolution for turning the analog signal to a digital sample.
The 12bits represents a digitization of 1/4096 – or 10’/4096 – the digitization resolution is 0.00244’ – which is 4 times better than the target accuracy of 0.01’
In practice the U30 data logger is 12bits across 0-20mA. The measurement range is 4-20mA – so the digitization resolution is 0.003’ – still acceptable for a target accuracy of 0.01’.
The logger is subject to environmental temperature changes and this is likely to be 0 – 40C.
The U30 is specified for an outdoor temperature range of -20 to 40C.
So this was the first component to verify, test the U30 4-20mA Analog interface for stable measurements across a reasonable field temperature range.
Well it was summer and the same time when streams run low in California, so temperature ranges of a U30 on a pole besides a stream could be 5C to 30C.
So setting the U30 outdoors with a resistor across the 4-20mA the following was recorded
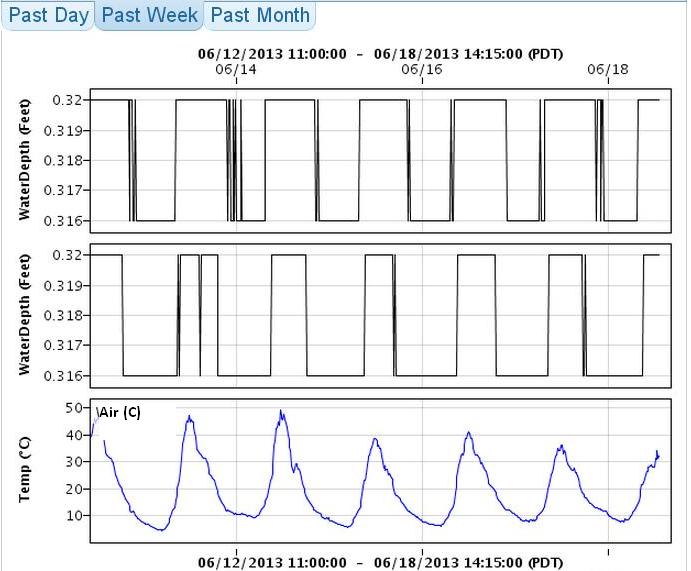
This graph, from the web interface of hobolink shows – air Temperature (bottom) for 6days – with an air temperature overnight that drops to 5C and peak day temperatures over 40C. The temperature measurement wasn’t actually in the U30 case, but an U30 air temperature sensor sitting on a field close to it. The environmental context is realistic.
What is nice – and oh, so good are the two graphs labeled WaterDepth (Feet) – with resistors connected across the U30 4-20ma terminals.
What shows is “digital noise” – that is the readings switch between 0.316’ and 0.320’ – or change by 0.004’ – which is close to the earlier calculation of digitization quantization across 4-20mA. It changes very slowly – which is good.
This verifies the U30 stability across the interested temperature range as EXCELLENT. It meets its specification for the very simple and realistic diurnal testing environment.
And – it turns out all the tested U30’s were reliable on their analog to digital temperature stability.
One item to note on the U30 cellular equipment (and any M2M cell equipment in the US) is ensure that they use 3G radios – see wild-wireless-world-2g-or-3g
With the next blog I will look at a sensor verification testing to see how well they meet their stated specification. Over all I’ve tested 5 different water level sensors, with a test focus on temperature stability. Next
RTR
on first look at your data I assumed the diurnal fluctuation of the stream level was due to evapotranspiration during the day of streamside trees and then the lack there of at night — it seems the pattern holds as expected
I have seen that in other gauged sites particularly where this is a lot of upstream forest — cheers!
Paul
neilh20
Hi Paul
Thanks for the comment. Yes that’s the intent – find out how much the stream is varying, which could be the diurnal fluctuation of the stream level, or other temperature dependent measurement errors.
In this case – the logger uses 4-20mA and a static resistor is used to simulate the sensor – holding the apparent reading relatively constant while the air temperature fluctuating quite severely 30C over a day.
This is an acceptance test on the U30 logger to verify it doesn’t introduce unexpected temperature error as per its specification.
In this case the logger + resistor induced variation across the day is 0.004′ ~ which is the limit of the ADC 12bit specification.
So the loggers are in good shape.
regards